


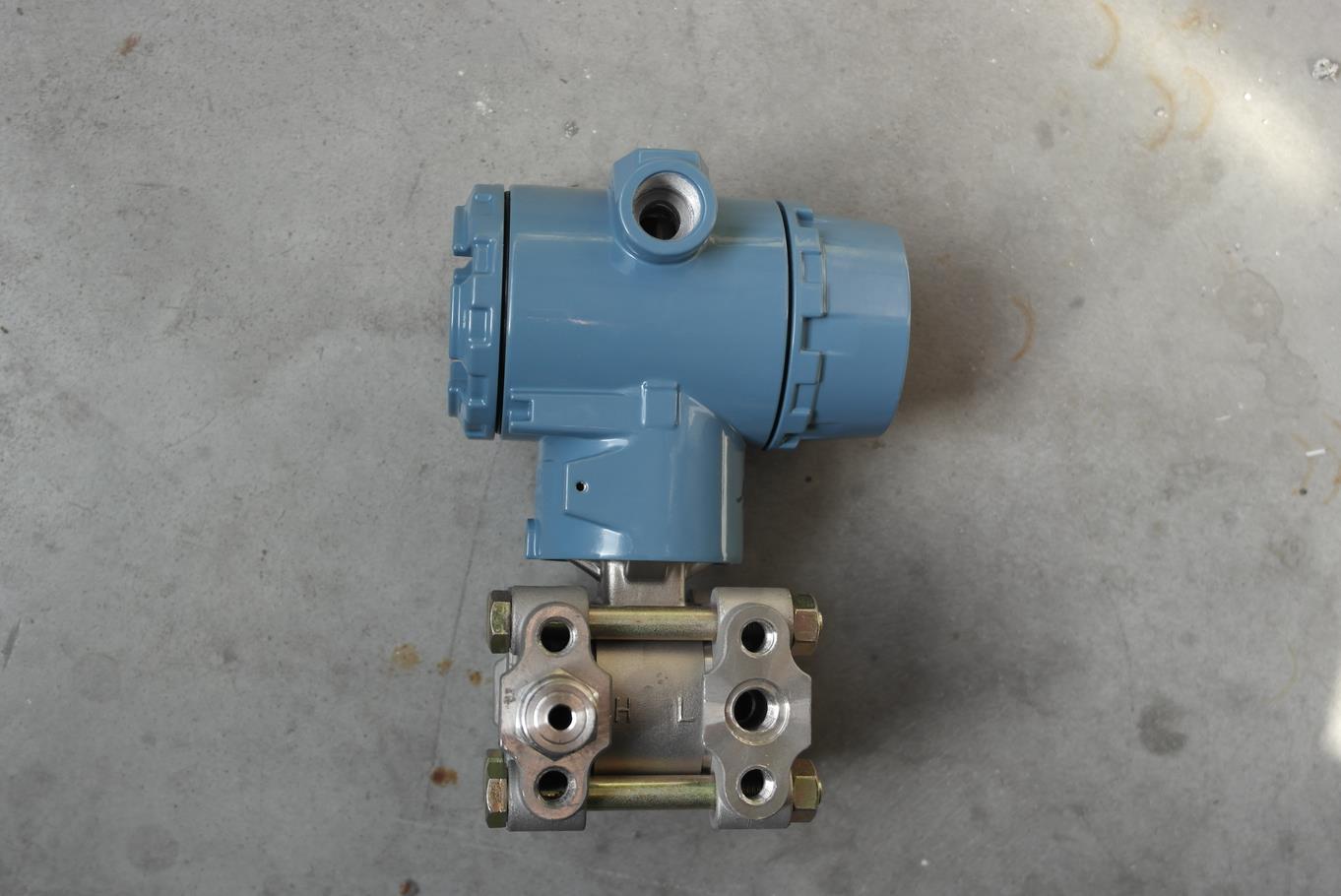
美安特自動化差壓變送器——強大的儀表裝置
產(chǎn)品說明:我將專注于我們用于完成該項目所有編程的PLC /差壓變送器,即Parker Automation Controller。差壓變送器是一個機器差壓變送器(PLC替換),,以及一個運動差壓變送器 - 所有在一個包中,。
全國咨詢熱線:
13151342466
-
產(chǎn)品說明
2015年夏天,,我和其他四位剛畢業(yè)的大學生一起參與了帕克小組項目,。剛從大學畢業(yè),我們沒有運動控制的經(jīng)驗,。該項目旨在為我們提供設(shè)計,,構(gòu)建和編程機電系統(tǒng)的經(jīng)驗。我們項目的目標是成功地移動金屬環(huán)圍繞的彎構(gòu)件管/擠出,,而無需使用六足觸碰它,。該項目總共涉及7個執(zhí)行器,7個電機,,7個驅(qū)動器,,一個PLC /差壓變送器,約50英尺的Parker IPS擠出機和定制平臺(用于六腳架),。
本文的目的不是關(guān)注項目本身,。我將專注于我們用于完成該項目所有編程的PLC /差壓變送器,即Parker Automation Controller,。差壓變送器是一個機器差壓變送器(PLC替換),,以及一個運動差壓變送器 - 所有在一個包中,。
我們小組編寫了一個復雜的動議計劃,涉及以下內(nèi)容:
? 7個虛軸,。
? 7實軸,。
? 我們自己的機器人運動功能塊。
? 多項安全任務(wù),。
? 凸輪表/ POU。
我們能夠在一周內(nèi)完成這項工作,,這是對差壓變送器的強大和直觀性的致敬,。關(guān)于差壓變送器有一些話要說,它允許一群剛畢業(yè)的大學生在如此短的時間內(nèi)對6軸機器人的運動學,,運動程序和安全程序進行編程,。
派克自動化經(jīng)理(PAM)
在我進入差壓變送器軟件之前,我想提一下它是免費的,。必須處理許可證和年度費用的日子已經(jīng)結(jié)束,。我不認為我必須說很多,但是不必更新許可證并擔心來自供應商的升級是非常方便的,??偟膩碚f,這是一個非常強大,,靈活的差壓變送器,。變送器是構(gòu)建PAM的底層應用程序。變送器是一個用于編程差壓變送器應用程序的集成開發(fā)環(huán)境,,符合IEC61131標準,。它是一個用戶可配置的環(huán)境,非常有條理和靈活,。Parker與變送器合作,,使PAM成為一個開放且用戶友好的軟件程序。差壓變送器是一個非常獨特的差壓變送器,,因為它設(shè)計有工具,,可以快速啟動簡單而復雜的項目,并以具有成本效益的價格輕松修改,。我提到該軟件是免費的嗎,?如果有人要買一個像Arduino這樣的差壓變送器,就會有很多編程和工作可以告訴處理器它需要如何接收,,發(fā)送和處理數(shù)據(jù),。幸運的是,我們生活在一個擁有為我們預先配置的差壓變送器和PLC的世界中,。但是,,差壓變送器將這一概念提升到了另一個層次,。不僅所有編程工作都已為用戶完成,而且與其他差壓變送器相比,,它增加了運動控制功能:
? CNC編程,。
? .dxf文件轉(zhuǎn)換為g代碼。
? 可視化,。
? 凸輪一代,。
? 機器人運動學。
? 極快的循環(huán)時間(差壓變送器運動總線),。
對于非程序員(傳統(tǒng)意義上的),,差壓變送器使運動控制更容易。然而,,習慣于深入編程深入黑暗的編程人員將不會感到不滿意,!這是一個完全開放的環(huán)境。功能塊,,POU和代碼都可以按用戶認為合適的方式編寫,。差壓變送器為用戶做了大量的工作。例如,,它會自動將.dxf文件轉(zhuǎn)換為g代碼,,并且 - 最重要的是 - 一旦轉(zhuǎn)換為g代碼,用戶就可以編輯或添加到該g代碼,。這種靈活的功能并不常見,。通常,制造商制造差壓變送器越專業(yè)化,,其應用程序就越有限,,因為無法編輯差壓變送器附帶的編程工作??傮w而言,,差壓變送器非常靈活,缺乏經(jīng)驗的程序員(新鮮的大學生)和經(jīng)驗豐富的程序員都可以輕松編寫復雜的運動程序,。像CAD一樣對動作做一些困難,,實際上只需點擊幾下即可。如果要從本節(jié)中刪除任何內(nèi)容,,那就是PAM是一個開放性很強的環(huán)境,,已經(jīng)為程序員做了很多工作,可以添加或編輯該工作,。哦是的,,我提到它是免費的嗎?
PAM編程樹
首先,PAM將從模板中自動為您生成基本項目樹,。為用戶填充了所有內(nèi)容,。在我看來,一切都很整潔有序,。當我在Parker工作時,,我沒有意識到自動創(chuàng)建一個整潔,有條理,,靈活的項目樹是多么方便,。對于其他差壓變送器,隨著項目變得越來越大,,樹將看起來越來越混亂,,反過來,使得更難找到特定參數(shù),,POU等。在PAM中,,一切都按邏輯組織,。例如,所有POU都可以在應用程序選項卡下或在名為POU的完全獨立的窗口下(字面上拖放),,這類似于將POU存儲在庫中并稍后調(diào)用以供使用,。這樣,程序員不必在他或她的項目樹中有20個POU,。同樣,,差壓變送器與之通信的所有設(shè)備都在差壓變送器_Master(差壓變送器320 差壓變送器主站)選項卡下進行組織。
編程語言
用戶可以選擇6種編程語言,,5種IEC61131標準語言(順序功能圖,,功能塊圖,指令列表,,梯形邏輯和結(jié)構(gòu)化文本)以及連續(xù)功能圖(變送器),,它是IEC61131是功能塊圖的自由形式版本。允許用戶將功能塊放在頁面的任何位置,。在某些情況下使用變送器是有利的,,因為它的限制較少。例如,,用戶繪制功能塊之間的連接線,。變送器是一種非常直觀的編程語言。程序的流程是用戶的想法,。顯示了變送器的一個示例,。擁有6種編程語言的美妙之處在于自由。用戶不僅不受每個差壓變送器的一種編程語言的限制,,而且如果需要,,他或她可以在單個項目期間在語言之間切換,。例如,您可以在變送器中編程,,但選擇在梯形邏輯中編寫整個POU,。通過使用6種編程語言,它使該差壓變送器對程序員和應用程序都很靈活,。某些語言更適合特定任務(wù),。例如,如果事情必須以非常特定的順序順序發(fā)生,,則梯形圖順序功能圖可能是最好的,。或者,,如果程序涉及大量數(shù)學,,結(jié)構(gòu)化文本可能是最好的方法。因此,,只有用戶可以選擇他們編程的內(nèi)容才有意義,。
易于連接到設(shè)備
連接到設(shè)備需要幾秒鐘。所有設(shè)備(驅(qū)動器,,I / O模塊等)都在底部選項卡“差壓變送器_Master(差壓變送器320 差壓變送器 Master)”下進行管理,。程序員所要做的就是右鍵單擊“差壓變送器_Master(差壓變送器320 差壓變送器 Master)”并選擇“Scan for Devices”。將打開一個窗口,,其中包含當前位于差壓變送器網(wǎng)絡(luò)上的設(shè)備列表,。派克設(shè)備將自動被識別。要添加差壓變送器非派克設(shè)備(例如I / O模塊或閥門歧管),,用戶必須下載該設(shè)備的.xml文件,。一旦用戶有.xml文件,該文件就可以安裝在庫管理器中,。從這里,,差壓變送器網(wǎng)絡(luò)將自動識別設(shè)備。圖顯示了如何將設(shè)備添加到網(wǎng)絡(luò)的示例,。制到項目”,,然后將所有這些設(shè)備放在差壓變送器_Master(差壓變送器320 差壓變送器主站)選項卡下。運動總線是差壓變送器,,因此,,設(shè)備不需要按任何特定順序。在此示例中,,差壓變送器IO_DI8_DO8是差壓變送器 IO模塊,。所述AXL_F_DI??8_DO8_1_1H是一個附加的IO模塊。其余3款是派克P-Drives。
CAD - 數(shù)控編程
差壓變送器中最大的區(qū)別因素之一是能夠進行計算機數(shù)字控制(CNC)編程,。變送器中的CNC工具允許用戶以圖形和文本方式編程多維運動,。在三維中,可以編程線,,弧,,橢圓弧,拋物線和樣條,。對于每個編程路徑,,變送器自動生成可在POU中使用的全局結(jié)構(gòu)。
要為程序添加CNC路徑:
1.右鍵單擊Application選項卡> Add Object> CNC程序,。
2.將.dxf文件(從CAD程序)導入該程序,。
3.導入文件后,PAM會自動生成程序代碼的外觀,。
這包括2D或3D可視空間,,其中所有用戶的點都繪制在該圖中。這些點可以是您希望機器人或龍門架系統(tǒng)進入的空間點,,也可以是您希望軸進入的實際位置,。除此之外,PAM還會生成程序用于運動的所有必需g代碼,。顯示了正方形和另一個更復雜路徑的示例。
關(guān)于CNC工具的最大優(yōu)點是我上面談到的所有內(nèi)容都很簡單并且為您執(zhí)行,。我所做的只是添加CNC程序并導入.dxf文件,。它不僅為我生成,而且是可編輯的,。所有的g代碼都是可定制的,。如果你知道g代碼,你可以從g代碼窗口編寫或編輯你的文件,??梢暬翱谏系乃悬c都可以通過單擊它們并在其他位置拖動它們來自動編輯(自動更新頂部窗口中的g代碼命令)。此外,,CNC工具生成的路徑是可編輯的,。將所有目標點放在CNC文件中的空間或軸位置是很棒的,但是達到這些點是另一回事,。如果運動不平滑或可調(diào)節(jié),,則系統(tǒng)將無法正常工作。變送器提供了專門為CNC工具編寫的功能塊庫,。編寫它們是為了使用戶可以控制點之間的路徑插值,。它們在繪制曲線,創(chuàng)建平滑運動,刀具校正,,路徑準備,,前向和后向插值等時派上用場。
這些函數(shù)允許用戶自定義路徑的所有內(nèi)容,,而不是軸從一個位置跳到另一個位置,。例如,路徑坐標被發(fā)送到驅(qū)動器的頻率,,運動的平滑/剛性,,或路徑本身的加速/減速。CNC工具非常易于使用,,具有人們所期望的所有可定制運動方面,。簡單的CNC程序可在幾分鐘內(nèi)完成。但是,,也可以根據(jù)用戶自定義路徑和調(diào)整路徑,。
Web可發(fā)布的可視化
作為一個額外的好處,Parker已經(jīng)在PAM中集成了變送器可視化工具,。我們現(xiàn)在能夠在PAM中可視化實時HMI和CNC路徑,。可視化工具完全適用于HMI,。在線模式下,,它是完全交互式的。例如,,這樣可以很好地在故障排除階段查看軸的狀態(tài)或點動軸,,而不是從看門狗窗口打開和關(guān)閉所有參數(shù)。此外,,任何功能塊都可以變成“幀”,。框架是該功能塊的可視化變送器為其許多功能提供了框架,。但是,,用戶能夠為尚未創(chuàng)建的任何功能塊創(chuàng)建框架,或者為用戶開發(fā)的自定義功能創(chuàng)建框架,。此外,,CNC路徑可以在軟件中可視化,同時還有實時更新以觀察路徑,??梢暬ぞ哌€具有創(chuàng)建對象和可視化對象的功能。下面是我們的應用專家Ben Bishop創(chuàng)建的3軸系統(tǒng)示例,。當程序運行時,,此可視化將在軟件中更新,。
差壓變送器的
差壓變送器使用差壓變送器作為其運動總線。差壓變送器是Beckhoff開發(fā)的確定性以太網(wǎng)協(xié)議,。它基本上是市場上最快的工業(yè)以太網(wǎng)協(xié)議,。根據(jù)差壓變送器技術(shù)組,差壓變送器可以在11μs內(nèi)更新256個數(shù)字I / O,,在100μs內(nèi)更新100個伺服軸,。差壓變送器技術(shù)組顯示了差壓變送器與其他實時以太網(wǎng)協(xié)議之間的比較。此外,,由于差壓變送器檢測設(shè)備的方式,,可以使用任何網(wǎng)絡(luò)拓撲:線路,菊花鏈,,樹或星形,。甚至可以在操作期間移除設(shè)備而不使網(wǎng)絡(luò)脫機,這在模塊化類型系統(tǒng)中是有益的,。根據(jù)個人經(jīng)驗,,我知道差壓變送器可以非常強大。當我們在Parker培訓課程中完成我們的項目時,,我們的團隊愚蠢地將所有POU(安全,,運動,監(jiān)控,,凸輪和我們的6軸機器人運動學計算)放在一個“運動”任務(wù)下,。事后來看,這不是一件非常聰明的事情,。但是,,我們很幸運,差壓變送器功能強大到足以在2 ms的周期內(nèi)處理所有這些問題,。
龍門架和機器人功能塊
PAM還包括用于普通龍門系統(tǒng)的正向和反向運動轉(zhuǎn)換的功能塊:XYZ龍門架,帶工具偏移的XYZθ,,XYZθ,,帶有固定軸的T或H龍門架系統(tǒng)以及在導軌內(nèi)部運行的皮帶,以及5軸XYZ變換系統(tǒng)和2軸刀頭機械手,。PAM還包括用于普通機器人的前向和反向運動轉(zhuǎn)換的功能塊:2個和3個聯(lián)合SCARA機器人,,4個軸碼垛機器人,6個DOF鉸接機器人和包括delta的并行機器人,。所有這些功能塊都包含有關(guān)如何使用它們以及變量在幫助文件中的含義的詳細說明,。當有人必須編程自己的機器人但不知道該機器人的運動學時,這些功能塊非常有用,。
本文的目的不是關(guān)注項目本身,。我將專注于我們用于完成該項目所有編程的PLC /差壓變送器,即Parker Automation Controller,。差壓變送器是一個機器差壓變送器(PLC替換),,以及一個運動差壓變送器 - 所有在一個包中,。
我們小組編寫了一個復雜的動議計劃,涉及以下內(nèi)容:
? 7個虛軸,。
? 7實軸,。
? 我們自己的機器人運動功能塊。
? 多項安全任務(wù),。
? 凸輪表/ POU。
我們能夠在一周內(nèi)完成這項工作,,這是對差壓變送器的強大和直觀性的致敬,。關(guān)于差壓變送器有一些話要說,它允許一群剛畢業(yè)的大學生在如此短的時間內(nèi)對6軸機器人的運動學,,運動程序和安全程序進行編程,。
派克自動化經(jīng)理(PAM)
在我進入差壓變送器軟件之前,我想提一下它是免費的,。必須處理許可證和年度費用的日子已經(jīng)結(jié)束,。我不認為我必須說很多,但是不必更新許可證并擔心來自供應商的升級是非常方便的,??偟膩碚f,這是一個非常強大,,靈活的差壓變送器,。變送器是構(gòu)建PAM的底層應用程序。變送器是一個用于編程差壓變送器應用程序的集成開發(fā)環(huán)境,,符合IEC61131標準,。它是一個用戶可配置的環(huán)境,非常有條理和靈活,。Parker與變送器合作,,使PAM成為一個開放且用戶友好的軟件程序。差壓變送器是一個非常獨特的差壓變送器,,因為它設(shè)計有工具,,可以快速啟動簡單而復雜的項目,并以具有成本效益的價格輕松修改,。我提到該軟件是免費的嗎,?如果有人要買一個像Arduino這樣的差壓變送器,就會有很多編程和工作可以告訴處理器它需要如何接收,,發(fā)送和處理數(shù)據(jù),。幸運的是,我們生活在一個擁有為我們預先配置的差壓變送器和PLC的世界中,。但是,,差壓變送器將這一概念提升到了另一個層次,。不僅所有編程工作都已為用戶完成,而且與其他差壓變送器相比,,它增加了運動控制功能:
? CNC編程,。
? .dxf文件轉(zhuǎn)換為g代碼。
? 可視化,。
? 凸輪一代,。
? 機器人運動學。
? 極快的循環(huán)時間(差壓變送器運動總線),。
對于非程序員(傳統(tǒng)意義上的),,差壓變送器使運動控制更容易。然而,,習慣于深入編程深入黑暗的編程人員將不會感到不滿意,!這是一個完全開放的環(huán)境。功能塊,,POU和代碼都可以按用戶認為合適的方式編寫,。差壓變送器為用戶做了大量的工作。例如,,它會自動將.dxf文件轉(zhuǎn)換為g代碼,,并且 - 最重要的是 - 一旦轉(zhuǎn)換為g代碼,用戶就可以編輯或添加到該g代碼,。這種靈活的功能并不常見,。通常,制造商制造差壓變送器越專業(yè)化,,其應用程序就越有限,,因為無法編輯差壓變送器附帶的編程工作??傮w而言,,差壓變送器非常靈活,缺乏經(jīng)驗的程序員(新鮮的大學生)和經(jīng)驗豐富的程序員都可以輕松編寫復雜的運動程序,。像CAD一樣對動作做一些困難,,實際上只需點擊幾下即可。如果要從本節(jié)中刪除任何內(nèi)容,,那就是PAM是一個開放性很強的環(huán)境,,已經(jīng)為程序員做了很多工作,可以添加或編輯該工作,。哦是的,,我提到它是免費的嗎?
PAM編程樹
首先,PAM將從模板中自動為您生成基本項目樹,。為用戶填充了所有內(nèi)容,。在我看來,一切都很整潔有序,。當我在Parker工作時,,我沒有意識到自動創(chuàng)建一個整潔,有條理,,靈活的項目樹是多么方便,。對于其他差壓變送器,隨著項目變得越來越大,,樹將看起來越來越混亂,,反過來,使得更難找到特定參數(shù),,POU等。在PAM中,,一切都按邏輯組織,。例如,所有POU都可以在應用程序選項卡下或在名為POU的完全獨立的窗口下(字面上拖放),,這類似于將POU存儲在庫中并稍后調(diào)用以供使用,。這樣,程序員不必在他或她的項目樹中有20個POU,。同樣,,差壓變送器與之通信的所有設(shè)備都在差壓變送器_Master(差壓變送器320 差壓變送器主站)選項卡下進行組織。
編程語言
用戶可以選擇6種編程語言,,5種IEC61131標準語言(順序功能圖,,功能塊圖,指令列表,,梯形邏輯和結(jié)構(gòu)化文本)以及連續(xù)功能圖(變送器),,它是IEC61131是功能塊圖的自由形式版本。允許用戶將功能塊放在頁面的任何位置,。在某些情況下使用變送器是有利的,,因為它的限制較少。例如,,用戶繪制功能塊之間的連接線,。變送器是一種非常直觀的編程語言。程序的流程是用戶的想法,。顯示了變送器的一個示例,。擁有6種編程語言的美妙之處在于自由。用戶不僅不受每個差壓變送器的一種編程語言的限制,,而且如果需要,,他或她可以在單個項目期間在語言之間切換,。例如,您可以在變送器中編程,,但選擇在梯形邏輯中編寫整個POU,。通過使用6種編程語言,它使該差壓變送器對程序員和應用程序都很靈活,。某些語言更適合特定任務(wù),。例如,如果事情必須以非常特定的順序順序發(fā)生,,則梯形圖順序功能圖可能是最好的,。或者,,如果程序涉及大量數(shù)學,,結(jié)構(gòu)化文本可能是最好的方法。因此,,只有用戶可以選擇他們編程的內(nèi)容才有意義,。
易于連接到設(shè)備
連接到設(shè)備需要幾秒鐘。所有設(shè)備(驅(qū)動器,,I / O模塊等)都在底部選項卡“差壓變送器_Master(差壓變送器320 差壓變送器 Master)”下進行管理,。程序員所要做的就是右鍵單擊“差壓變送器_Master(差壓變送器320 差壓變送器 Master)”并選擇“Scan for Devices”。將打開一個窗口,,其中包含當前位于差壓變送器網(wǎng)絡(luò)上的設(shè)備列表,。派克設(shè)備將自動被識別。要添加差壓變送器非派克設(shè)備(例如I / O模塊或閥門歧管),,用戶必須下載該設(shè)備的.xml文件,。一旦用戶有.xml文件,該文件就可以安裝在庫管理器中,。從這里,,差壓變送器網(wǎng)絡(luò)將自動識別設(shè)備。圖顯示了如何將設(shè)備添加到網(wǎng)絡(luò)的示例,。制到項目”,,然后將所有這些設(shè)備放在差壓變送器_Master(差壓變送器320 差壓變送器主站)選項卡下。運動總線是差壓變送器,,因此,,設(shè)備不需要按任何特定順序。在此示例中,,差壓變送器IO_DI8_DO8是差壓變送器 IO模塊,。所述AXL_F_DI??8_DO8_1_1H是一個附加的IO模塊。其余3款是派克P-Drives。
CAD - 數(shù)控編程
差壓變送器中最大的區(qū)別因素之一是能夠進行計算機數(shù)字控制(CNC)編程,。變送器中的CNC工具允許用戶以圖形和文本方式編程多維運動,。在三維中,可以編程線,,弧,,橢圓弧,拋物線和樣條,。對于每個編程路徑,,變送器自動生成可在POU中使用的全局結(jié)構(gòu)。
要為程序添加CNC路徑:
1.右鍵單擊Application選項卡> Add Object> CNC程序,。
2.將.dxf文件(從CAD程序)導入該程序,。
3.導入文件后,PAM會自動生成程序代碼的外觀,。
這包括2D或3D可視空間,,其中所有用戶的點都繪制在該圖中。這些點可以是您希望機器人或龍門架系統(tǒng)進入的空間點,,也可以是您希望軸進入的實際位置,。除此之外,PAM還會生成程序用于運動的所有必需g代碼,。顯示了正方形和另一個更復雜路徑的示例。
關(guān)于CNC工具的最大優(yōu)點是我上面談到的所有內(nèi)容都很簡單并且為您執(zhí)行,。我所做的只是添加CNC程序并導入.dxf文件,。它不僅為我生成,而且是可編輯的,。所有的g代碼都是可定制的,。如果你知道g代碼,你可以從g代碼窗口編寫或編輯你的文件,??梢暬翱谏系乃悬c都可以通過單擊它們并在其他位置拖動它們來自動編輯(自動更新頂部窗口中的g代碼命令)。此外,,CNC工具生成的路徑是可編輯的,。將所有目標點放在CNC文件中的空間或軸位置是很棒的,但是達到這些點是另一回事,。如果運動不平滑或可調(diào)節(jié),,則系統(tǒng)將無法正常工作。變送器提供了專門為CNC工具編寫的功能塊庫,。編寫它們是為了使用戶可以控制點之間的路徑插值,。它們在繪制曲線,創(chuàng)建平滑運動,刀具校正,,路徑準備,,前向和后向插值等時派上用場。
這些函數(shù)允許用戶自定義路徑的所有內(nèi)容,,而不是軸從一個位置跳到另一個位置,。例如,路徑坐標被發(fā)送到驅(qū)動器的頻率,,運動的平滑/剛性,,或路徑本身的加速/減速。CNC工具非常易于使用,,具有人們所期望的所有可定制運動方面,。簡單的CNC程序可在幾分鐘內(nèi)完成。但是,,也可以根據(jù)用戶自定義路徑和調(diào)整路徑,。
Web可發(fā)布的可視化
作為一個額外的好處,Parker已經(jīng)在PAM中集成了變送器可視化工具,。我們現(xiàn)在能夠在PAM中可視化實時HMI和CNC路徑,。可視化工具完全適用于HMI,。在線模式下,,它是完全交互式的。例如,,這樣可以很好地在故障排除階段查看軸的狀態(tài)或點動軸,,而不是從看門狗窗口打開和關(guān)閉所有參數(shù)。此外,,任何功能塊都可以變成“幀”,。框架是該功能塊的可視化變送器為其許多功能提供了框架,。但是,,用戶能夠為尚未創(chuàng)建的任何功能塊創(chuàng)建框架,或者為用戶開發(fā)的自定義功能創(chuàng)建框架,。此外,,CNC路徑可以在軟件中可視化,同時還有實時更新以觀察路徑,??梢暬ぞ哌€具有創(chuàng)建對象和可視化對象的功能。下面是我們的應用專家Ben Bishop創(chuàng)建的3軸系統(tǒng)示例,。當程序運行時,,此可視化將在軟件中更新,。
差壓變送器的
差壓變送器使用差壓變送器作為其運動總線。差壓變送器是Beckhoff開發(fā)的確定性以太網(wǎng)協(xié)議,。它基本上是市場上最快的工業(yè)以太網(wǎng)協(xié)議,。根據(jù)差壓變送器技術(shù)組,差壓變送器可以在11μs內(nèi)更新256個數(shù)字I / O,,在100μs內(nèi)更新100個伺服軸,。差壓變送器技術(shù)組顯示了差壓變送器與其他實時以太網(wǎng)協(xié)議之間的比較。此外,,由于差壓變送器檢測設(shè)備的方式,,可以使用任何網(wǎng)絡(luò)拓撲:線路,菊花鏈,,樹或星形,。甚至可以在操作期間移除設(shè)備而不使網(wǎng)絡(luò)脫機,這在模塊化類型系統(tǒng)中是有益的,。根據(jù)個人經(jīng)驗,,我知道差壓變送器可以非常強大。當我們在Parker培訓課程中完成我們的項目時,,我們的團隊愚蠢地將所有POU(安全,,運動,監(jiān)控,,凸輪和我們的6軸機器人運動學計算)放在一個“運動”任務(wù)下,。事后來看,這不是一件非常聰明的事情,。但是,,我們很幸運,差壓變送器功能強大到足以在2 ms的周期內(nèi)處理所有這些問題,。
龍門架和機器人功能塊
PAM還包括用于普通龍門系統(tǒng)的正向和反向運動轉(zhuǎn)換的功能塊:XYZ龍門架,帶工具偏移的XYZθ,,XYZθ,,帶有固定軸的T或H龍門架系統(tǒng)以及在導軌內(nèi)部運行的皮帶,以及5軸XYZ變換系統(tǒng)和2軸刀頭機械手,。PAM還包括用于普通機器人的前向和反向運動轉(zhuǎn)換的功能塊:2個和3個聯(lián)合SCARA機器人,,4個軸碼垛機器人,6個DOF鉸接機器人和包括delta的并行機器人,。所有這些功能塊都包含有關(guān)如何使用它們以及變量在幫助文件中的含義的詳細說明,。當有人必須編程自己的機器人但不知道該機器人的運動學時,這些功能塊非常有用,。
相關(guān)產(chǎn)品
- 不同溫度變送器理論壓力變送器常識2021-03-29
- 液位變送器安裝方法壓力變送器適用2021-03-29
- 壓力變送器的實際懸著方法2020-08-19
- 在壓力變送器電路故障時這些檢查不2020-08-19
- 差壓變送器超時工作后需要保持穩(wěn)定2020-08-18
- 液位變送器有幾種測試方式呢?2020-08-18
- 工作壓力變送器怎樣維護保養(yǎng),?2020-08-13
- 壓力變送器應用中常見故障和解決方2020-08-13

